FMCW Radar 202 - CFAR Pd Pfa Pmiss
![]()
Executive summary
CFAR (peak finding) in its different variants defines a threshold as a function of neighbouring cells adjacent values to minimise false-alert the correlate is tht the false-negative rate will be a function of the noise (see below for details).
Design trade-off options:
Measure Noise (details TBD) and enter
safe statewhen noise too highproceed to M-out-of-N (aka
binary integration) see below for details to decrease Pmiss when SNR too high and increase the FTTI accordingly
LITTERATURE REVIEW
COMPARISON OF CFARS
Performance Analysis of CFAR Detector Based on Censored Mean and Cell Average doi:10.1088/1742-6596/1237/2/022029
Performance Analysis of the Censored Mean-Level Detector
Mean-level detectors are commonly used in radar to maintain a constant false-alarm rate (CFAR) when the background noise level is unknown […] When the reference channel consists of independent and identically distributed (i.i.d.) noise samples from the same population as contained by the cell under test under the null hypothesis, this detector is the uniformly most powerful (UMP) test whose false-alarm probability is invariant to the noise level […]
A number of authors [3, 8-11] have shown that the detection performance of the MLD can be severely degraded when the assumption of a locally homogeneous noise environment is violated. Interfering or outlying targets that fall within the surrounding range cells raise the threshold and reduce the detection probability; they can arise from either real object returns or pulsed noise jamming.
IWR6843 COR
NF = 12 dB (as per datasheet)
RCS = 0.17m2 (as per IEC 61496)
max Tx power = 12 dBm = 16 mW (FCC value ?!?)
Where:
PR = received power
PT = Transmitted power
G = Antenna Gain
sigma = RCS target
R = distance to target
[15]:
# PR at Dmax = 5m
from numpy import pi, log10
R = 5
PT = 16e-3
f = 60e9
c = 3e8
G_dBi = 8 # dBi
G = 10**(G_dBi/10)
# print("G",G)
lambda0 = c/f
PR = PT * G**2 * lambda0*2/(4*pi)**3/R**4
print("PR (W)",PR)
PR_dB = 10 * log10(PR/1e-3)
print("PR dB", PR_dB)
PR (W) 5.1358268476838975e-09
PR dB -52.89389626754439
THEORETICAL STUDY for Receiver Operating Characteristic (ROC)
credit roc in python
[16]:
import numpy as np
import matplotlib.pyplot as plt
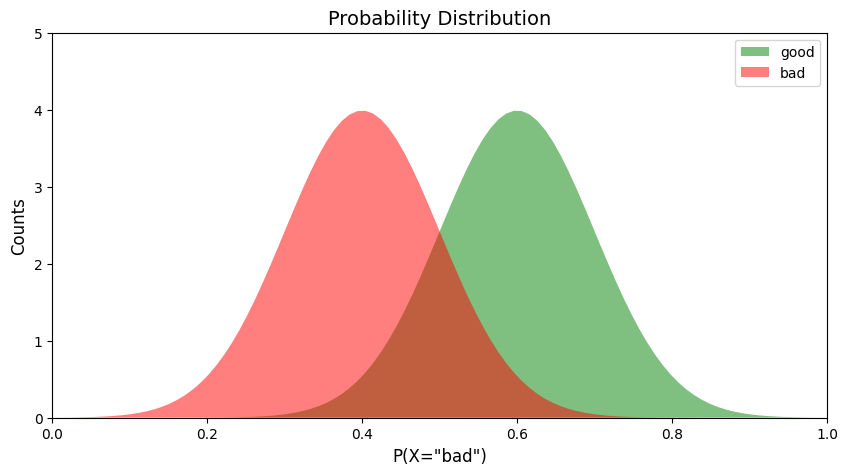
def pdf(x, std, mean):
const = 1.0 / np.sqrt(2*np.pi*(std**2))
pdf_normal_dist = const*np.exp(-((x-mean)**2)/(2.0*(std**2)))
return pdf_normal_dist
x = np.linspace(0, 1, num=100)
good_pdf = pdf(x,0.1,0.6)
bad_pdf = pdf(x,0.1,0.4)
def plot_pdf(good_pdf, bad_pdf, ax):
ax.fill(x, good_pdf, "g", alpha=0.5)
ax.fill(x, bad_pdf,"r", alpha=0.5)
ax.set_xlim([0,1])
ax.set_ylim([0,5])
ax.set_title("Probability Distribution", fontsize=14)
ax.set_ylabel('Counts', fontsize=12)
ax.set_xlabel('P(X="bad")', fontsize=12)
ax.legend(["good","bad"])
fig, ax = plt.subplots(1,1, figsize=(10,5))
plot_pdf(good_pdf, bad_pdf, ax)
[17]:
import numpy as np
import matplotlib.pyplot as plt
def pdf_norm(x, mu_std):
mean, std, = mu_std
const = 1.0 / np.sqrt(2*np.pi*(std**2))
pdf_normal_dist = const*np.exp(-((x-mean)**2)/(2.0*(std**2)))
return pdf_normal_dist
x = np.linspace(0, 1, num=100)
def plot_cfar(good, bad, ax, cfar_ratio=2, title="CFAR and Pmiss"):
good_pdf = pdf_norm(x,good)
bad_pdf = pdf_norm(x,bad)
yMg=max(good_pdf)
yMb=max(bad_pdf)
yM = max(yMg, yMb)
mean, std, = bad
cfar_th = mean + cfar_ratio*std
ax.fill(x, good_pdf, "g", alpha=0.5)
ax.fill(x, bad_pdf,"r", alpha=0.5)
ax.set_xlim([0,1])
ax.set_ylim([0,yM])
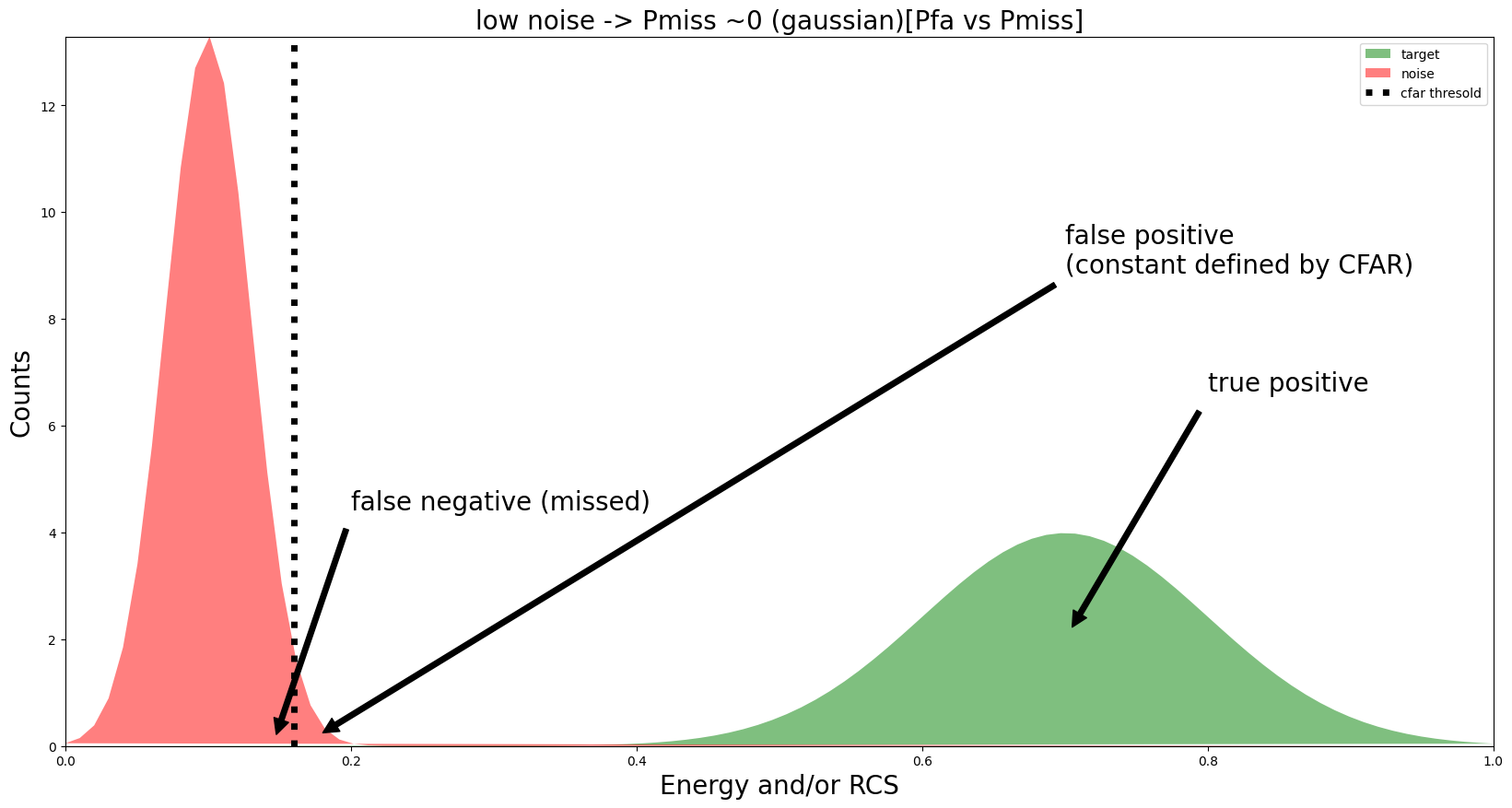
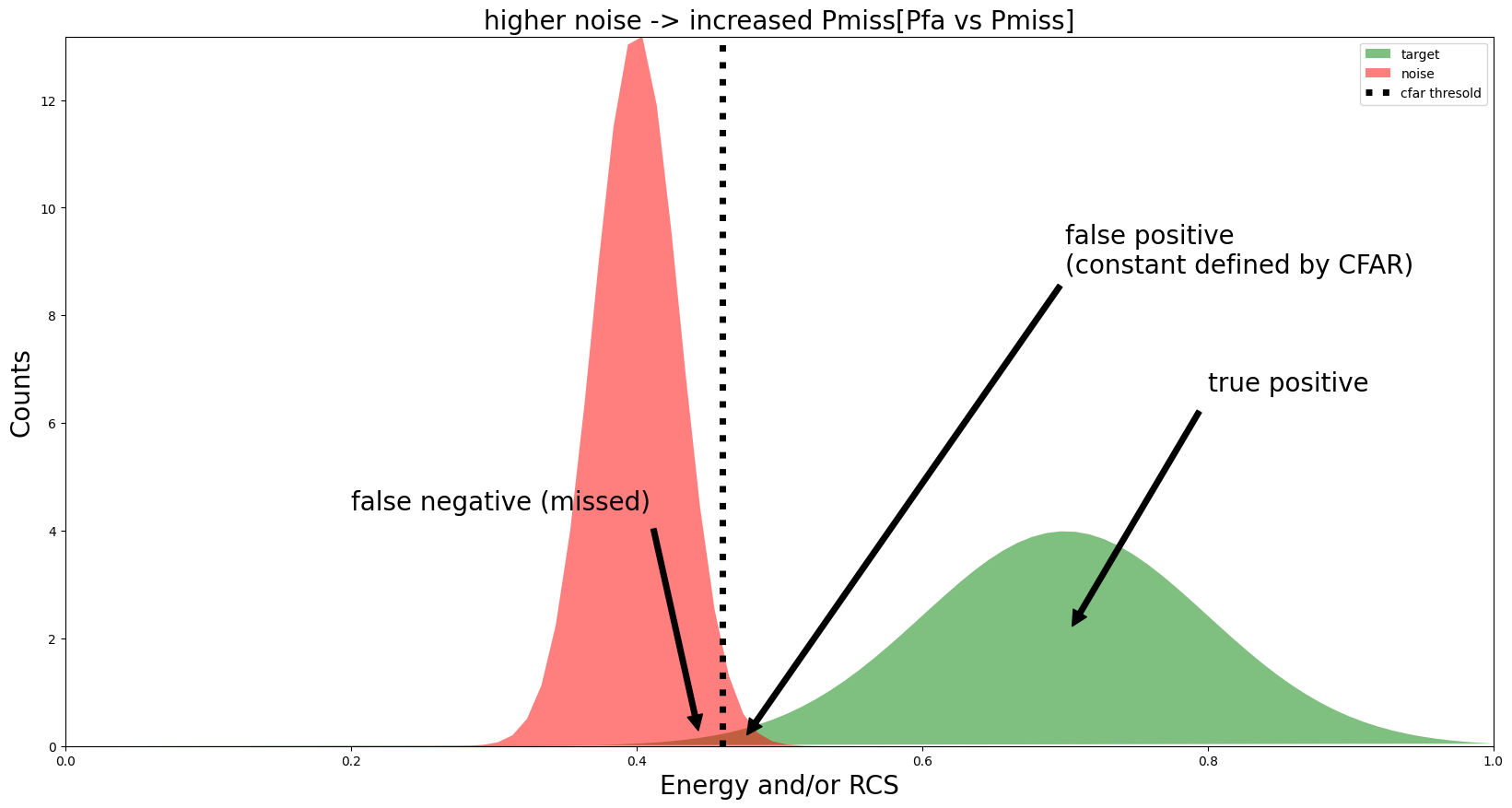
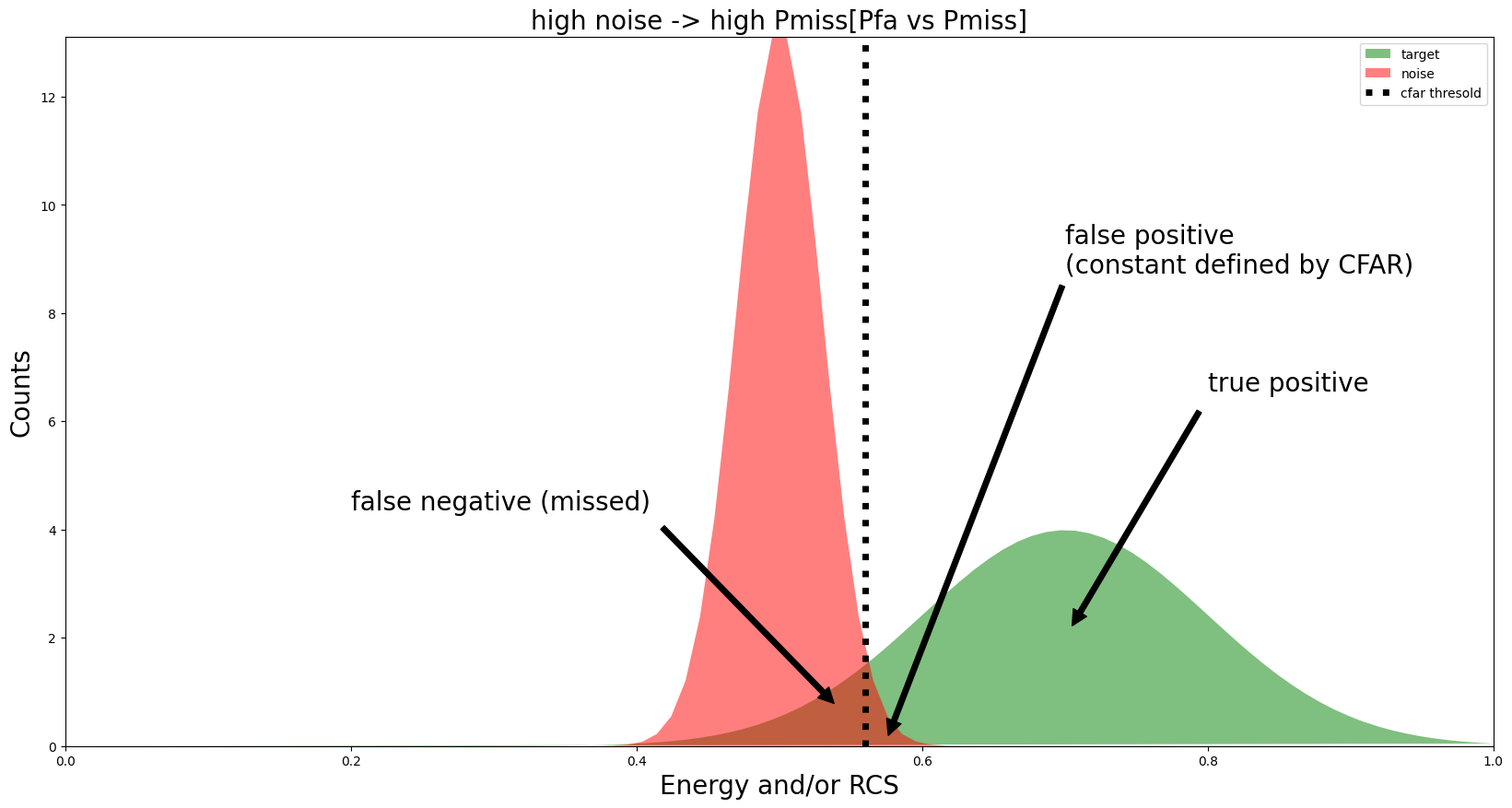
ax.set_title(title+"[Pfa vs Pmiss]", fontsize=20)
ax.set_ylabel('Counts', fontsize=20)
ax.set_xlabel('Energy and/or RCS', fontsize=20)
ax.vlines(x=cfar_th,ymin=0,ymax=yM,colors='black', ls=':', lw=5,
label='CFAR threshold')
xe = cfar_th+std/2
ye = bad_pdf[int(xe*100)+1] /2
ax.annotate(f'false positive \n(constant defined by CFAR)', xy=(xe, ye), xytext=(0.7, yM*2/3),
arrowprops=dict(facecolor='black', shrink=0.01), fontsize=20)
ax.annotate(f'true positive', xy=(0.7, 2), xytext=(0.8, yM/2),
arrowprops=dict(facecolor='black', shrink=0.05), fontsize=20)
xe = cfar_th-std/2
print(title,"xe miss",xe)
ye = good_pdf[int(xe*100)]/2
print(44,ye)
ax.annotate(f'false negative (missed)', xy=(xe,ye), xytext=(0.2, yM*1/3),
arrowprops=dict(facecolor='black', shrink=0.05), fontsize=20)
ax.legend(["target","noise","cfar thresold"])
def plot_cfar_rayleigh_rician(good, bad, ax, cfar_ratio=2, title="CFAR and Pmiss"):
pass
fig, ax = plt.subplots(1,1, figsize=(20,10))
plot_cfar((0.7,0.1), (0.1,0.03), ax, title="low noise -> Pmiss ~0 (gaussian)")
fig, ax = plt.subplots(1,1, figsize=(20,10))
plot_cfar((0.7,0.1), (0.4,0.03), ax, title="higher noise -> increased Pmiss")
fig, ax = plt.subplots(1,1, figsize=(20,10))
plot_cfar((0.7,0.1), (0.5,0.03), ax, title="high noise -> high Pmiss")
low noise -> Pmiss ~0 (gaussian) xe miss 0.14500000000000002
44 3.345736870929259e-07
higher noise -> increased Pmiss xe miss 0.445
44 0.07615894663550861
high noise -> high Pmiss xe miss 0.545
44 0.6042812783574958
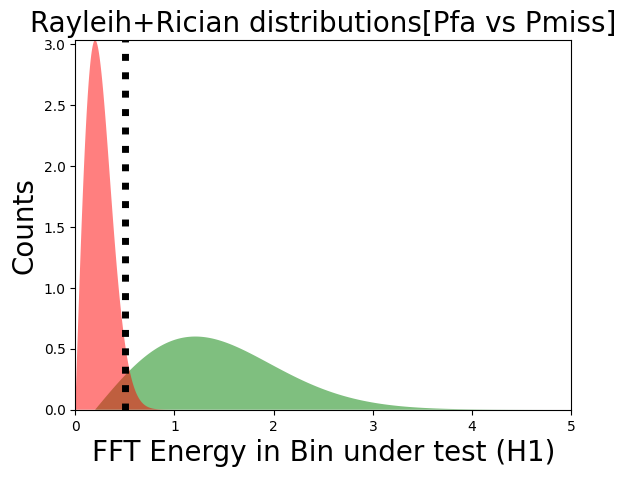
Signal and Noise Modelling
Noise in FFT is modelled by a Rayleigh distribution
Signal is best modelled by a Rician distribution
[18]:
from scipy.stats import rayleigh, rice
def plot_rayleigh_rician(ax, good, bad, cfar_ratio=2, title="Rayleih+Rician distributions"):
xm, xM = 0, 5
x = np.linspace(xm, xM, num=1000)
cfar_th = 0.5
good_pdf = rice.pdf(x, b=0.2, loc=0.2)
bad_pdf = rayleigh.pdf(x, 0, 0.2)
yMg=max(good_pdf)
yMb=max(bad_pdf)
yM = max(yMg, yMb)
ax.fill(x, good_pdf, "g", alpha=0.5)
ax.fill(x, bad_pdf,"r", alpha=0.5)
ax.set_xlim([xm,xM])
ax.set_ylim([0,yM])
ax.set_title(title+"[Pfa vs Pmiss]", fontsize=20)
ax.set_ylabel('Counts', fontsize=20)
ax.set_xlabel('FFT Energy in Bin under test (H1)', fontsize=20)
ax.vlines(x=cfar_th,ymin=0,ymax=yM,colors='black', ls=':', lw=5,
label='CFAR threshold')
fig, ax = plt.subplots(1,1) #, figsize=(20,10))
plot_rayleigh_rician(ax, (0.7,0.1), (0.7,0.1))
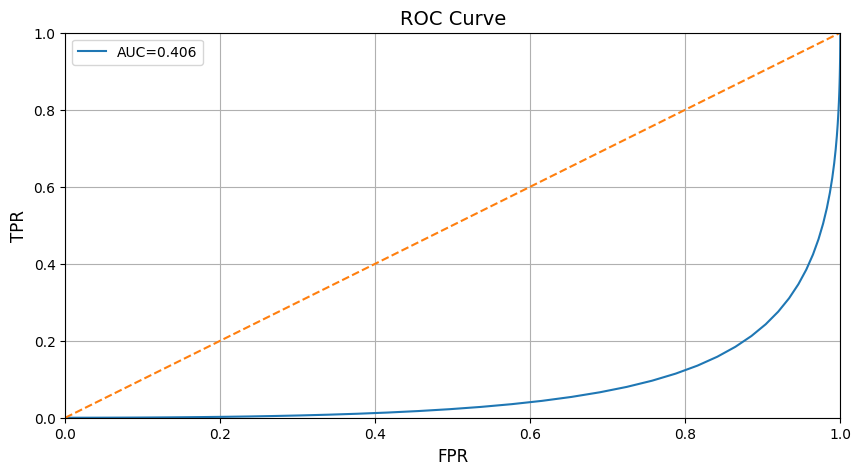
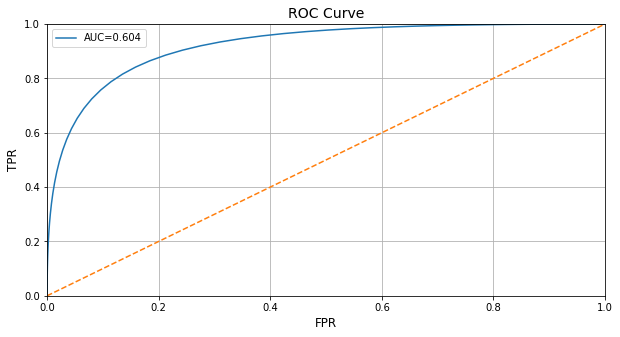
ROC curve
[19]:
def plot_roc(good_pdf, bad_pdf, ax):
#Total
total_bad = np.sum(bad_pdf)
total_good = np.sum(good_pdf)
#Cumulative sum
cum_TP = 0
cum_FP = 0
#TPR and FPR list initialization
TPR_list=[]
FPR_list=[]
#Iteratre through all values of x
for i in range(len(x)):
#We are only interested in non-zero values of bad
if bad_pdf[i]>0:
cum_TP+=bad_pdf[len(x)-1-i]
cum_FP+=good_pdf[len(x)-1-i]
FPR=cum_FP/total_good
TPR=cum_TP/total_bad
TPR_list.append(TPR)
FPR_list.append(FPR)
#Calculating AUC, taking the 100 timesteps into account
auc=np.sum(TPR_list)/100
#Plotting final ROC curve
ax.plot(FPR_list, TPR_list)
ax.plot(x,x, "--")
ax.set_xlim([0,1])
ax.set_ylim([0,1])
ax.set_title("ROC Curve", fontsize=14)
ax.set_ylabel('TPR', fontsize=12)
ax.set_xlabel('FPR', fontsize=12)
ax.grid()
ax.legend(["AUC=%.3f"%auc])
fig, ax = plt.subplots(1,1, figsize=(10,5))
plot_roc(good_pdf, bad_pdf, ax)
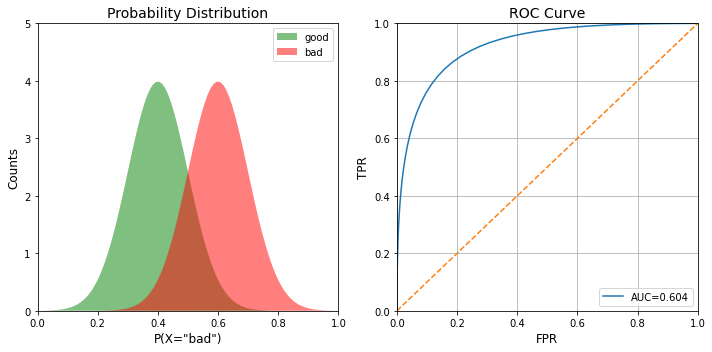
[21]:
fig, ax = plt.subplots(1,2, figsize=(10,5))
plot_pdf(good_pdf, bad_pdf, ax[0])
plot_roc(good_pdf, bad_pdf, ax[1])
plt.tight_layout()
[23]:
x = np.linspace(0, 1, num=100)
fig, ax = plt.subplots(3,2, figsize=(10,12))
means_tuples = [(0.5,0.5),(0.4,0.6),(0.3,0.7)]
i=0
for good_mean, bad_mean in means_tuples:
good_pdf = pdf(x, 0.1, good_mean)
bad_pdf = pdf(x, 0.1, bad_mean)
plot_pdf(good_pdf, bad_pdf, ax[i,0])
plot_roc(good_pdf, bad_pdf, ax[i,1])
i+=1
plt.tight_layout()
COMPARISON OF CFARS
Performance Analysis of CFAR Detector Based on Censored Mean and Cell Average doi:10.1088/1742-6596/1237/2/022029
Binary Integration (MooN)
source Radar Systems Analysis and Designs - Bassem R. Mahafza Eq 13.82 and related
Basic idea is that CFAR detection is repeated N times (N separate chirps) and the final decision declares a target detection if M out of N decision have resulted in a detectinon.
The underlying result follows a binomial distribution.
To maintain Pfa while decreasing Pmiss, one considers that the detection probability and Pmiss probability will be improved by MooN in the following way
The resulting being that N chirps (or frames) are needed to secure appropriate detection which will decrease the FTTI
Swerling fluctuation considerations when doing MooN
One additional considerations after choosing the M and N values is the target fluctuation.
Table 13.1 in ibid makes suggestions for this.
[32]:
from datetime import datetime as dt
print(f"last checked: {dt.now().date()}")
last checked: 2026-06-27