f0 = 62e9
# Number of ADC samples
NA = 64
# Number of TX channels
NT = 8
# Number of RX channels
NR = 8
void = Medium()
c = void.v
lambda0 = c/f0
_fs = 4e3
_k = 70e8
TXs = [Antenna(x=NR*lambda0/2*i) for i in range(NT)]
RXs = [Antenna(x=lambda0/2*i) for i in range(NR)]
radar = Radar(transmitter=Transmitter(bw=3.5e9, slope=_k,
antennas=TXs),
receiver=Receiver(fs=_fs, max_adc_buffer_size=2048,
n_adc=NA,
antennas=RXs),
debug=False)
r1, theta1 = 10.1, 0
x1, y1 = r1*cos(theta1), r1*sin(theta1)
r2, theta2 = 20.1, pi/2
x2, y2 = r2*cos(theta2), r2*sin(theta2)
r3, theta3 = 30.1, pi
x3, y3 = r3*cos(theta3), r3*sin(theta3)
target1 = Target(x1, y1, 0) # 0 degrees on x-axis <=> -pi/2 vs bore sight
target2 = Target(x2, y2, 0) # pi/2 degrees vs x-ax <=> 0 degree vs bore sight
target3 = Target(x3, y3, 0) # 180 degrees on x-axis <=> pi/2 vs boresight
targets = [target1, target2, target3]
bb = rt_points(radar, targets,
debug=False)
cube = bb["adc_cube"]
# bb[frame_i, chirp_i, tx_i, rx_i, adc_i]
# generate virtual antennas
virtual_cube = zeros(( NT * NR, NA))
print("??1", virtual_cube.shape)
for tx_idx in range(NT):
for rx_idx in range(NR):
virtual_cube[tx_idx*NT+ rx_idx,:] = cube[:, :, tx_idx, rx_idx, :]
print("??2", virtual_cube.shape)
fast_time_axis = 1
RX_antennas_axis = 0
# first compute the range FFT
R_fft = fft(virtual_cube, axis=fast_time_axis)
# then compute the AoA FFT
A_FFT = fft(R_fft, axis=RX_antennas_axis)
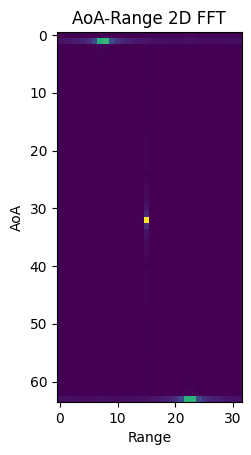
# for Range vs AoA, display magnitude
# and need to fftshift to have the negative frequencies moved around 0
Z_fft = abs(fftshift(A_FFT[:,:], axes=0))
plt.xlabel("Range")
plt.ylabel("AoA")
plt.title('AoA-Range 2D FFT')
plt.imshow(Z_fft[:,:NA//2])